合成生物学 ›› 2021, Vol. 2 ›› Issue (1): 134-144.DOI: 10.12211/2096-8280.2020-059
• 研究论文 • 上一篇
新型克隆挑取机器人设计与实验研究
朱伟1,2, 赵文亮1,2, 何凯1,2
- 1.中国科学院深圳先进技术研究院,深圳市精密工程重点实验室,广东 深圳 518055
2.中国科学院深圳先进技术研究院,粤港澳人机智能协同系统联合实验室 广东 深圳 518055
-
收稿日期:2020-04-04修回日期:2020-11-17出版日期:2021-02-28发布日期:2021-03-12 -
通讯作者:何凯 -
作者简介:朱伟(1991-),男,硕士,助理工程师,主要研究方向为机械结构设计、运动控制、机器视觉。E-mail:wei.zhu@siat.ac.cn
何凯(1972-),男,博士,教授级高级工程师,主要研究方向为精密制造及自动化技术、工业机器人、金属成形技术及装备、生物制造自动化技术等。E-mail:kai.he@siat.ac.cn -
基金资助:国家重点研发计划(2018YFA0902900)
Design and experimental research of new robot for clone selection
ZHU Wei1,2, ZHAO Wenling1,2, HE Kai1,2
- 1.Shenzhen Key Laboratory of Precision Engineering,Shenzhen Institute of Advanced Technology,Chinese Academy of Sciences,Shenzhen 518055,Guangdong,China
2.Guangdong-Hong Kong-Macao Joint Laboratory of Human-Machine Intelligence-Synergy Systems,Shenzhen Institute of Advanced Technology,Chinese Academy of Sciences,Shenzhen 518055,Guangdong,China
-
Received:2020-04-04Revised:2020-11-17Online:2021-02-28Published:2021-03-12 -
Contact:HE Kai
摘要:
克隆挑取主要运用于基因测序、蛋白质表达和高通量筛选等领域。当前克隆挑取任务主要由手工完成,随着科研院所以及医药公司对克隆挑取这项任务需求的爆发式增长,低效率的人工挑取已满足不了市场需求。与人工相比,机器人在挑取效率和精度上均得到了显著提升。基于传统克隆挑取机器人加工成本高、挑取周期长和消毒不彻底等因素,本文设计了一种新型克隆挑取机器人,采用气缸驱动夹取机构,在夹取机构中运用气爪来抓取一次性挑针的方法实现克隆挑取操作。搭建了一套基于工控机运动控制、HexSight菌落识别及定位的嵌入式集成系统,并通过对大肠杆菌克隆的挑取进行了实验验证。结果表明控制系统可以实现对菌落的识别与定位,定位精度为0.03 mm,各气缸、气爪可以精确挑取指定菌落并接种到96孔板中,证明了一次性挑针挑取方式的可行性。
中图分类号:
引用本文
朱伟, 赵文亮, 何凯. 新型克隆挑取机器人设计与实验研究[J]. 合成生物学, 2021, 2(1): 134-144.
ZHU Wei, ZHAO Wenling, HE Kai. Design and experimental research of new robot for clone selection[J]. Synthetic Biology Journal, 2021, 2(1): 134-144.
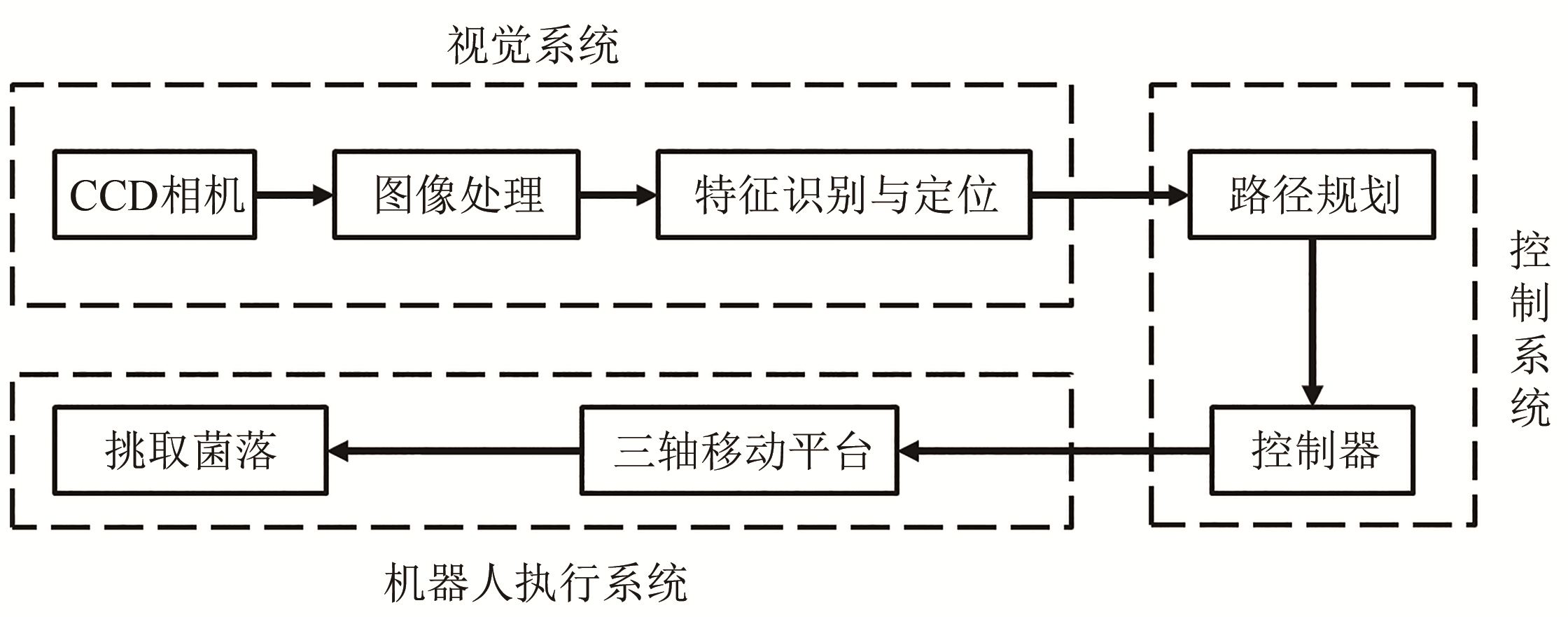
图1 克隆挑取设备单个克隆挑取经历过程
Fig. 1 Single clone-selecting process
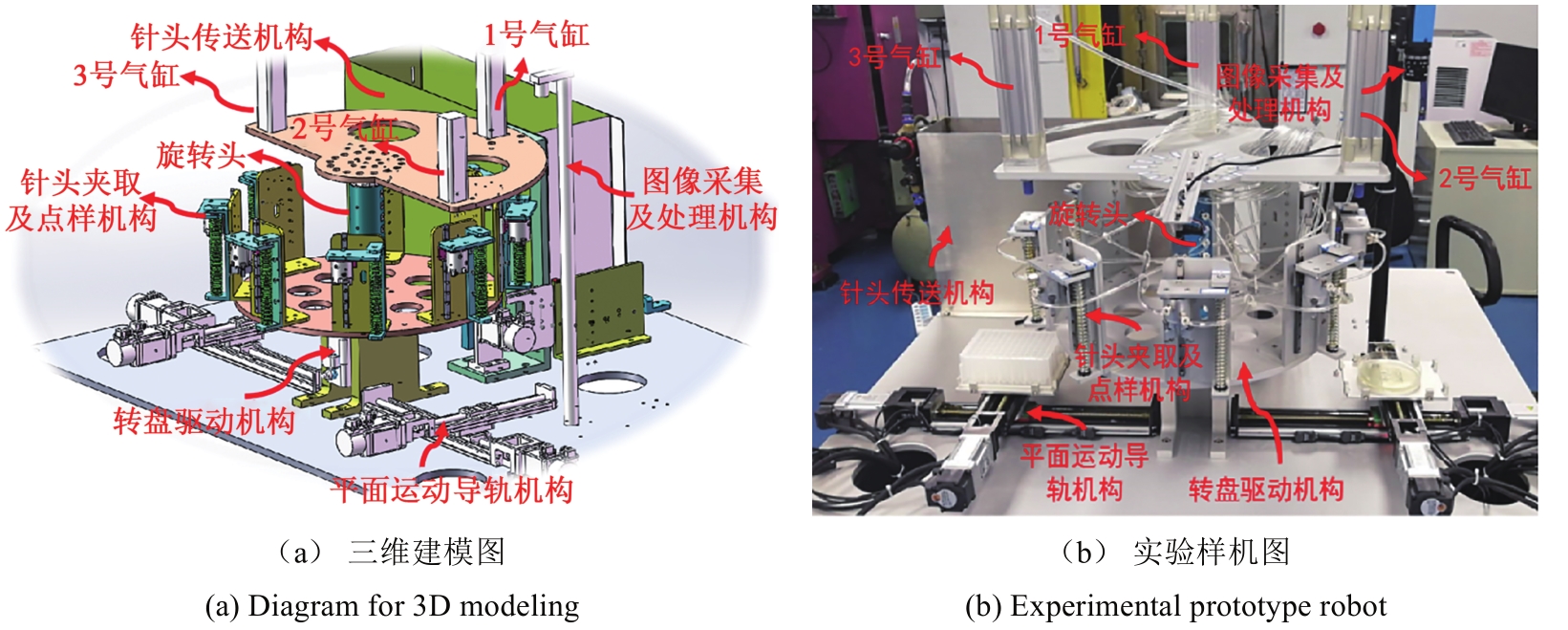
图2 克隆挑取机器人基本结构
Fig. 2 Basic structure of the clone-selecting robot

图3 各构件及系统关系图
Fig. 3 Design for the clone-selecting robot

图4 控制系统结构图
Fig. 4 Design for the control unit
| 引脚 | 信号 | 功能 |
|---|---|---|
| 1 | EXO 0 | 一号气爪输出 |
| 2 | EXO 1 | 二号气爪输出 |
| 3 | EXO 2 | 三号气爪输出 |
| 4 | EXO 3 | 四号气爪输出 |
| 5 | EXO 4 | 五号气爪输出 |
| 6 | EXO 5 | 六号气爪输出 |
| 7 | EXO 6 | 七号气爪输出 |
| 8 | EXO 7 | 八号气爪输出 |
| 9 | EXO 8 | 一号气缸输出 |
| 10 | EXO 9 | 二号气缸输出 |
| 11 | EXO 10 | 三号气缸输出 |
表2 各输出端口地址分配及功能表
Tab. 2 Address allocation and function of the output ports
| 引脚 | 信号 | 功能 |
|---|---|---|
| 1 | EXO 0 | 一号气爪输出 |
| 2 | EXO 1 | 二号气爪输出 |
| 3 | EXO 2 | 三号气爪输出 |
| 4 | EXO 3 | 四号气爪输出 |
| 5 | EXO 4 | 五号气爪输出 |
| 6 | EXO 5 | 六号气爪输出 |
| 7 | EXO 6 | 七号气爪输出 |
| 8 | EXO 7 | 八号气爪输出 |
| 9 | EXO 8 | 一号气缸输出 |
| 10 | EXO 9 | 二号气缸输出 |
| 11 | EXO 10 | 三号气缸输出 |

图5 控制卡原理及端子板接线图
Fig. 5 Control principle and terminal board for the signal input and output
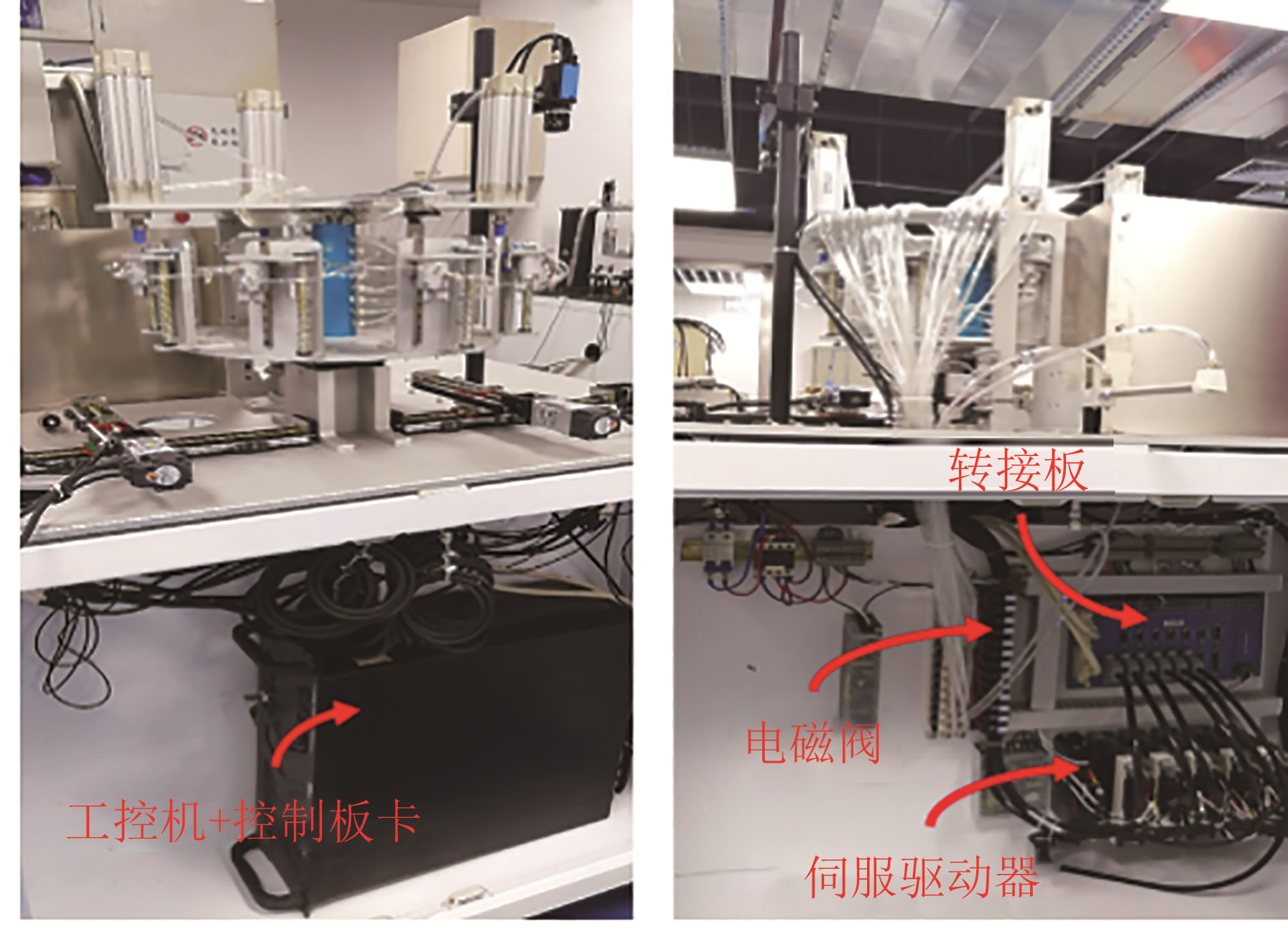
图6 控制系统硬件连接图
Fig. 6 Hardware for the control system
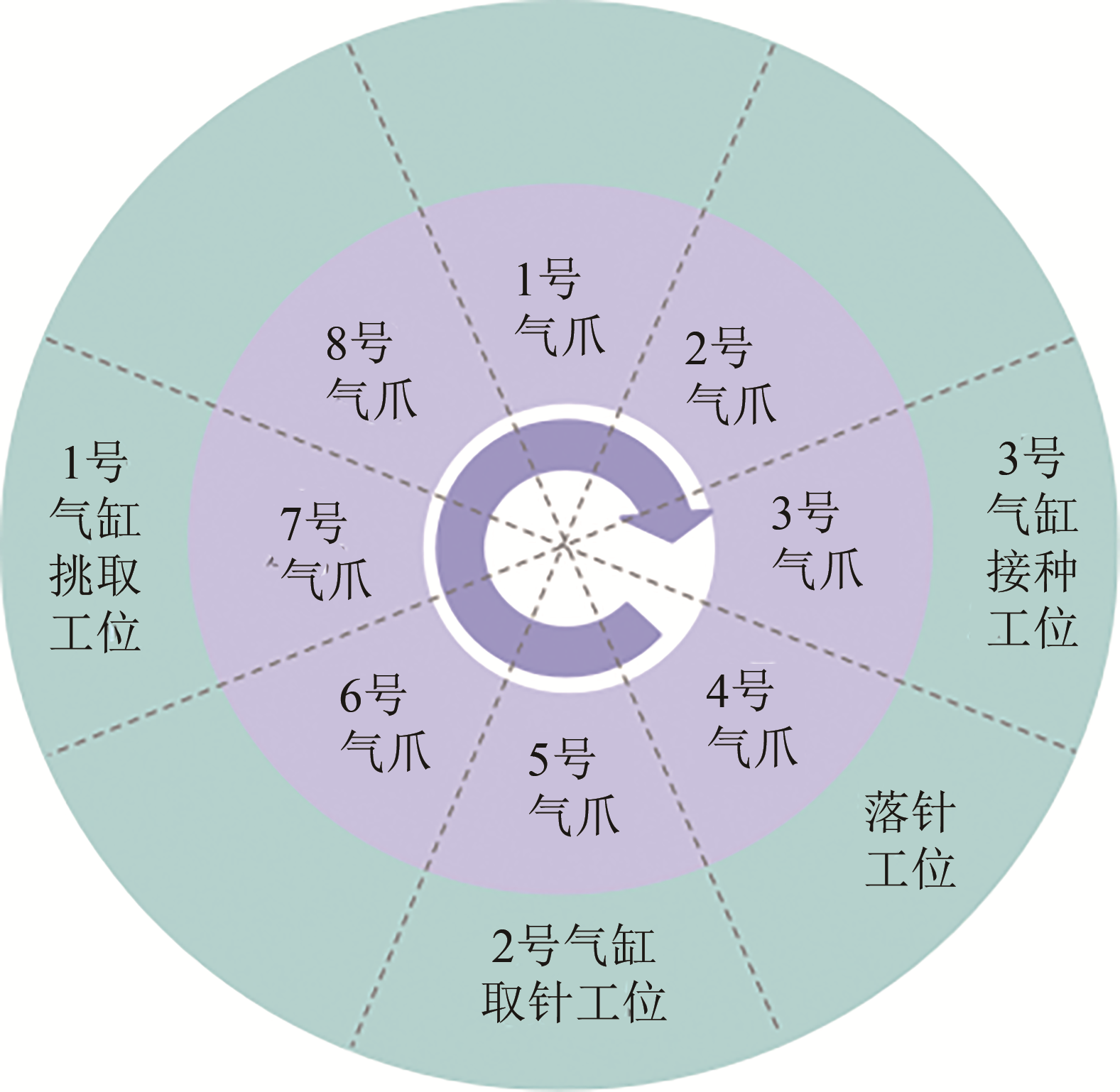
图7 气缸、气爪位置关系及运行过程
Fig. 7 Position and the operation process of the cylinder and pneumatic gripper
| 循环次数 | 气爪编号 | |||
|---|---|---|---|---|
| 取针 | 挑取 | 接种 | 落针 | |
| 1 | 5 | 7 | 3 | 4 |
| 2 | 4 | 6 | 2 | 3 |
| 3 | 3 | 5 | 1 | 2 |
| 4 | 2 | 4 | 8 | 1 |
| 5 | 1 | 3 | 7 | 8 |
| 6 | 8 | 2 | 6 | 7 |
| 7 | 7 | 1 | 5 | 6 |
| 8 | 6 | 8 | 4 | 5 |
表3 满载循环工作各气爪上挑针功能
Tab. 3 Picking function of the needles on each pneumatic gripper in a full-load working cycle
| 循环次数 | 气爪编号 | |||
|---|---|---|---|---|
| 取针 | 挑取 | 接种 | 落针 | |
| 1 | 5 | 7 | 3 | 4 |
| 2 | 4 | 6 | 2 | 3 |
| 3 | 3 | 5 | 1 | 2 |
| 4 | 2 | 4 | 8 | 1 |
| 5 | 1 | 3 | 7 | 8 |
| 6 | 8 | 2 | 6 | 7 |
| 7 | 7 | 1 | 5 | 6 |
| 8 | 6 | 8 | 4 | 5 |
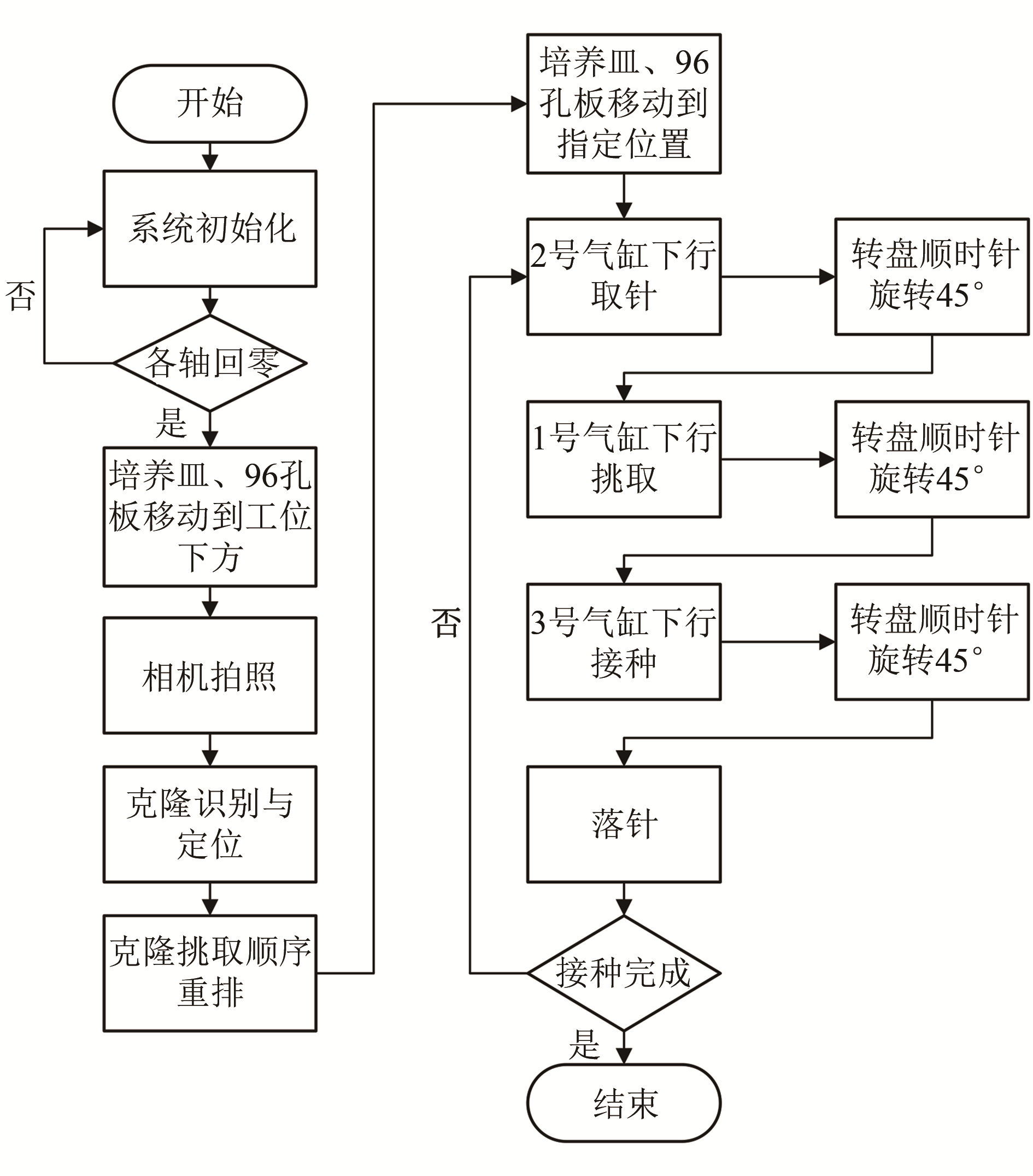
图8 控制系统工作流程图
Fig. 8 Working flowsheet for the control system
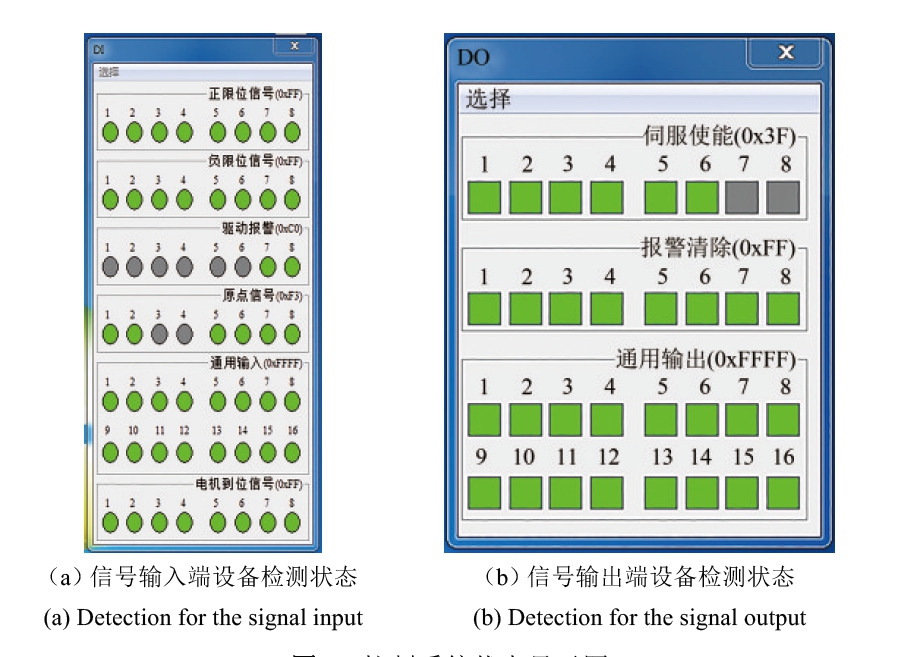
图9 控制系统状态显示图
Fig. 9 Display of the control system
| 引脚 | 信号 | 功能 |
|---|---|---|
| 1 | HOME 0 | 一轴原点输入 |
| 2 | HOME 1 | 二轴原点输入 |
| 3 | HOME 2 | 三轴原点输入 |
| 4 | HOME 3 | 四轴原点输入 |
| 5 | LIMIT 0+ | 一轴正向限位 |
| 6 | LIMIT 0- | 一轴负向限位 |
| 7 | LIMIT 1+ | 二轴正向限位 |
| 8 | LIMIT 1- | 二轴负向限位 |
| 9 | LIMIT 2+ | 三轴正向限位 |
| 10 | LIMIT 2- | 三轴负向限位 |
| 11 | LIMIT 3+ | 四轴正向限位 |
| 12 | LIMIT 3- | 四轴负向限位 |
| 13 | EXI 0 | 转盘零点输入 |
| 14 | EXI 1 | 转块零点输入 |
| 15 | EXI 2 | 转块一孔有无输入 |
| 16 | EXI 3 | 转块二孔有无输入 |
表1 各输入端口地址分配及功能表
Tab. 1 Address allocation and function of the input ports
| 引脚 | 信号 | 功能 |
|---|---|---|
| 1 | HOME 0 | 一轴原点输入 |
| 2 | HOME 1 | 二轴原点输入 |
| 3 | HOME 2 | 三轴原点输入 |
| 4 | HOME 3 | 四轴原点输入 |
| 5 | LIMIT 0+ | 一轴正向限位 |
| 6 | LIMIT 0- | 一轴负向限位 |
| 7 | LIMIT 1+ | 二轴正向限位 |
| 8 | LIMIT 1- | 二轴负向限位 |
| 9 | LIMIT 2+ | 三轴正向限位 |
| 10 | LIMIT 2- | 三轴负向限位 |
| 11 | LIMIT 3+ | 四轴正向限位 |
| 12 | LIMIT 3- | 四轴负向限位 |
| 13 | EXI 0 | 转盘零点输入 |
| 14 | EXI 1 | 转块零点输入 |
| 15 | EXI 2 | 转块一孔有无输入 |
| 16 | EXI 3 | 转块二孔有无输入 |
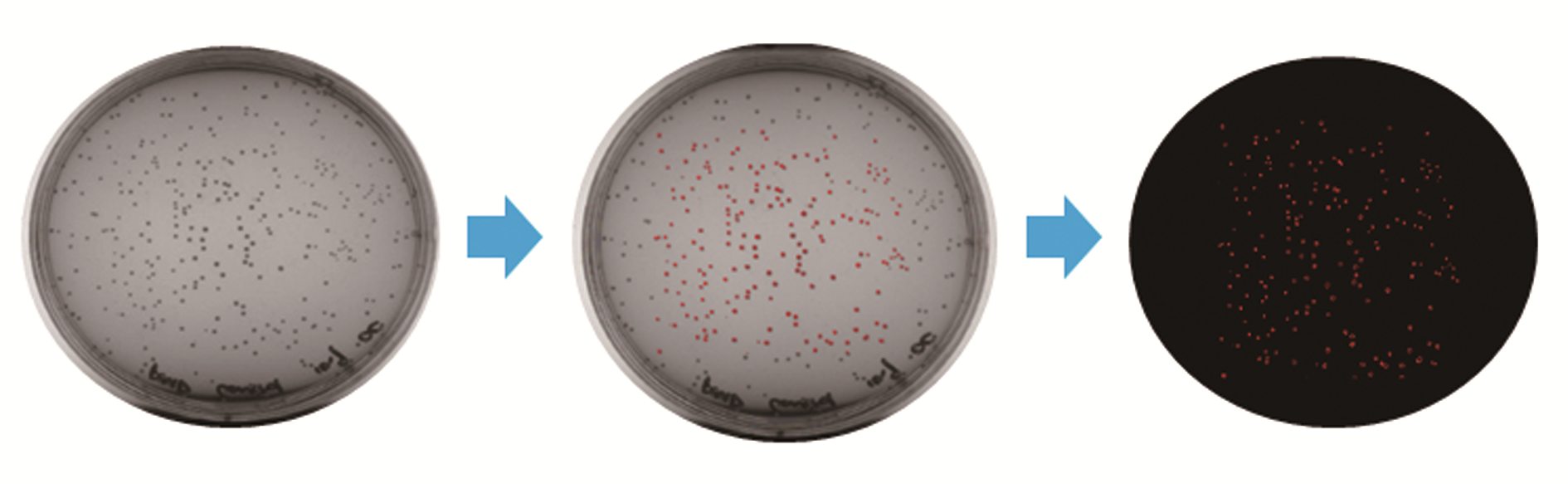
图10 菌落图像识别及筛选
Fig. 10 Colony image recognition and screening
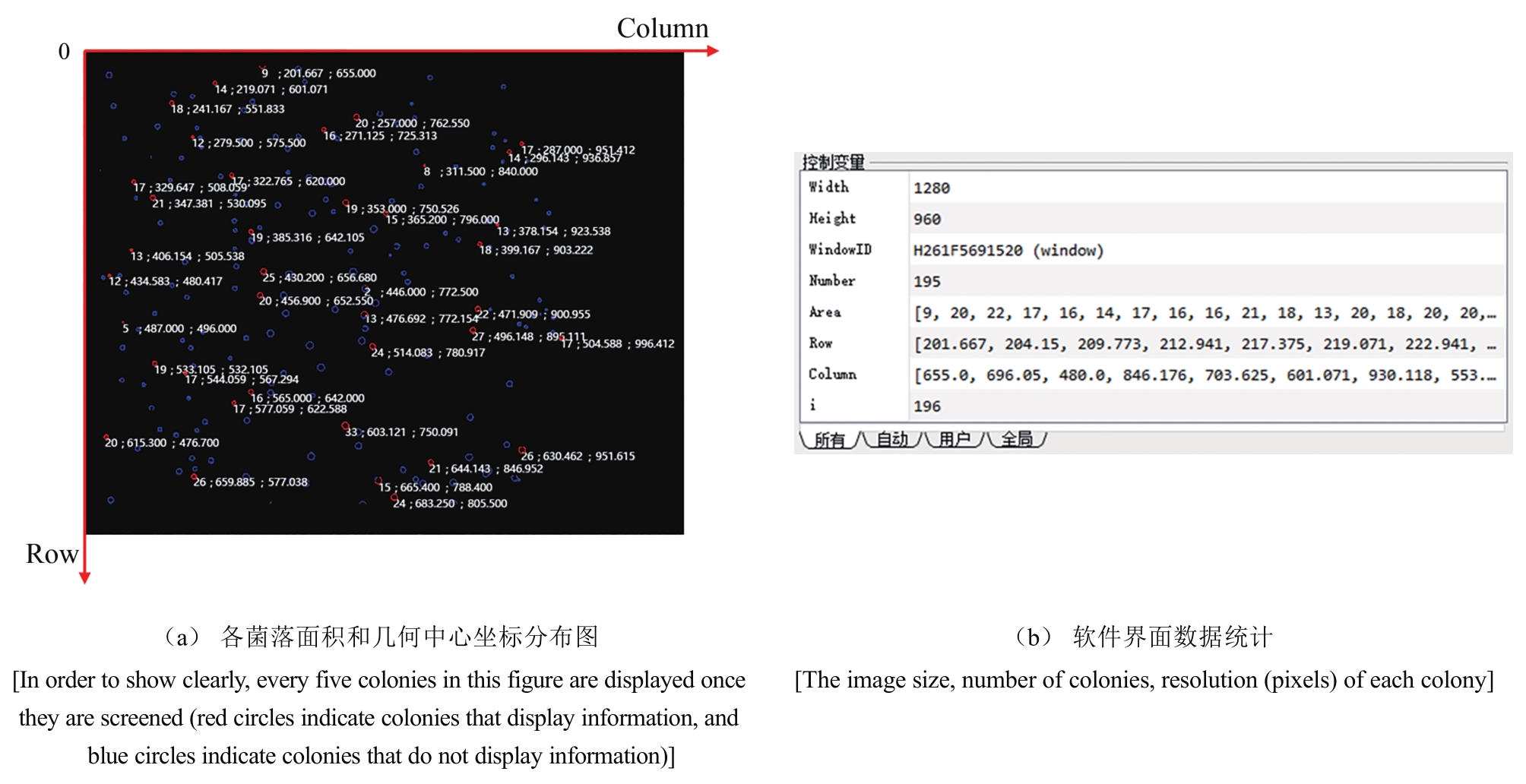
图11 各目标菌落面积及几何中心坐标
Fig. 11 Target colony area and geometric center coordinates
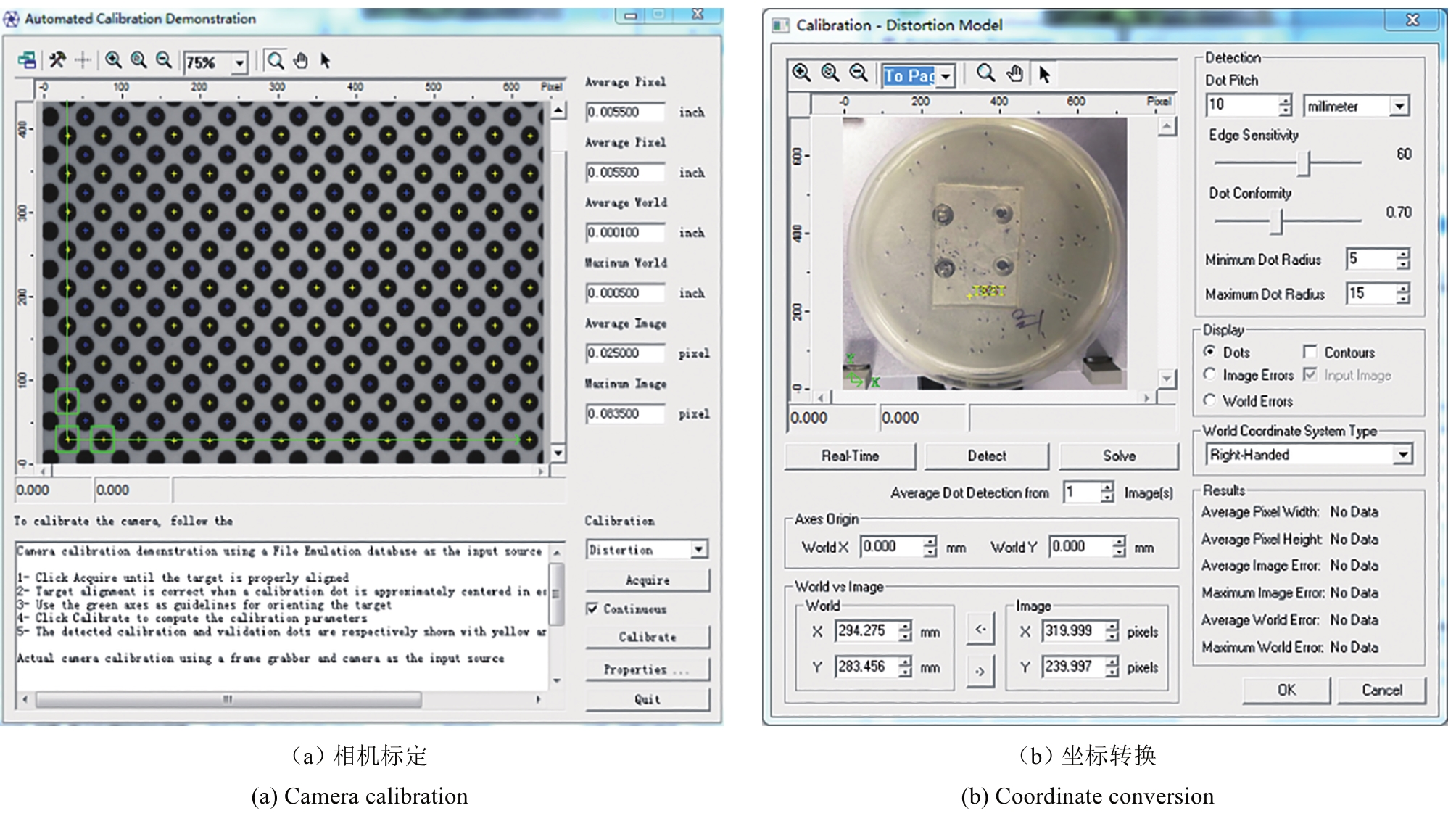
图12 相机标定及坐标转换
Fig. 12 Camera calibration and coordinate conversion

图13 运行步骤实物图
Fig. 13 Process operation
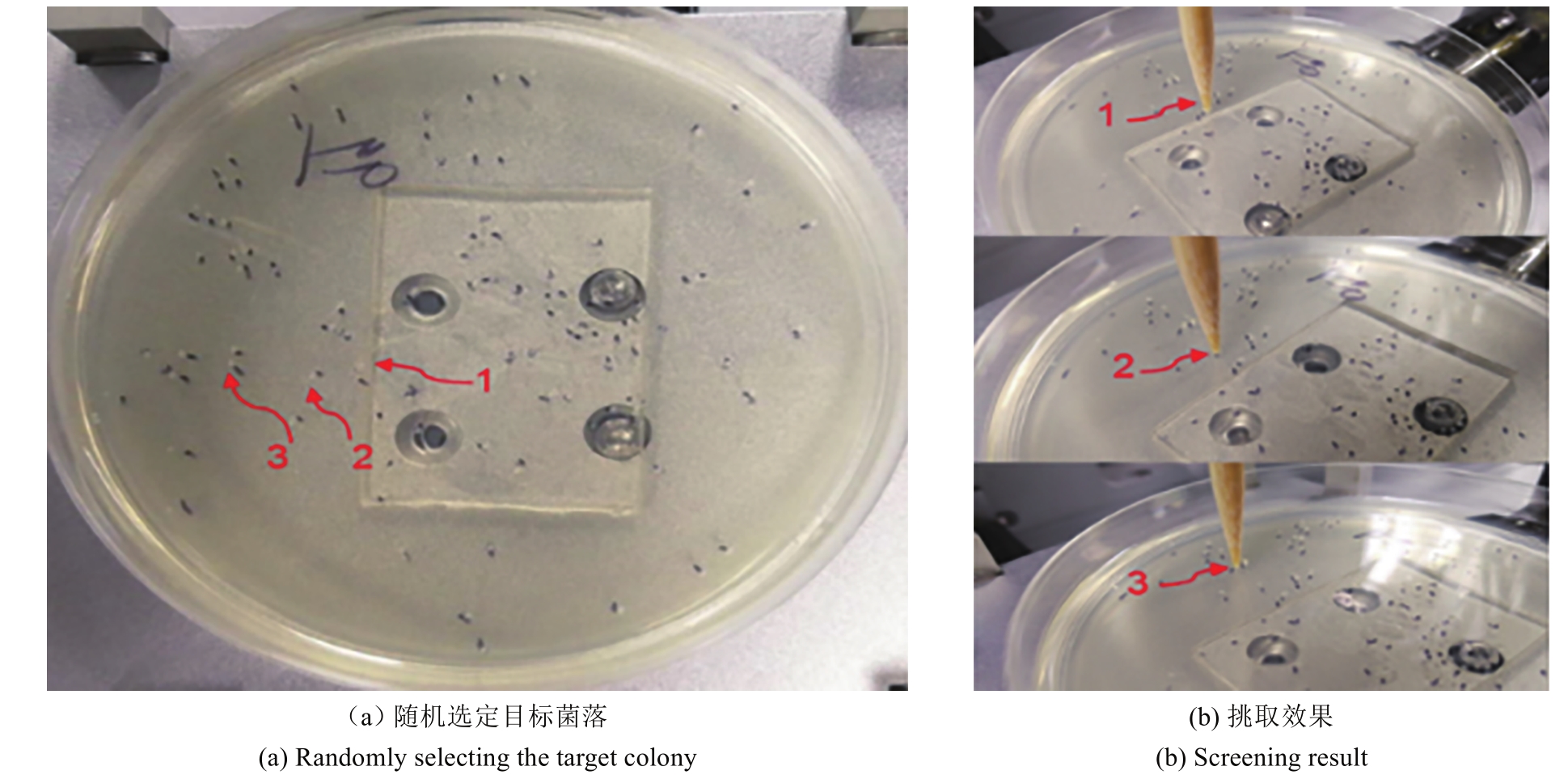
图14 选定目标菌落及其挑取结果
Fig. 14 Target colonies selected and their analysis
| 选取点 | 实际坐标(mm) | 定位坐标(mm) | (ΔX,ΔY) | 误差 |
|---|---|---|---|---|
| 1 | (-10.000,10.000) | (-10.031,10.005) | (-0.031,0.005) | 0.031 |
| 2 | (-20.000,20.000) | (-20.034,20.006) | (-0.034,0.006) | 0.035 |
| 3 | (-30.000,30.000) | (-30.013,30.006) | (-0.013,0.006) | 0.014 |
| 4 | (-30.000,10.000) | (-30.008,10.027) | (-0.008,0.027) | 0.028 |
| 5 | (-10.000,30.000) | (-10.021,29.985) | (-0.021,-0.015) | 0.026 |
| 6 | (10.000,10.000) | (9.994,10.009) | (-0.006,0.009) | 0.011 |
| 7 | (20.000,20.000) | (20.008,20.003) | (0.008,0.003) | 0.009 |
| 8 | (30.000,30.000) | (30.057,30.001) | (0.057,0.001) | 0.057 |
| 9 | (30.000,10.000) | (29.980,10.015) | (-0.020,0.015) | 0.025 |
| 10 | (10.000,30.000) | (10.044,29.996) | (0.044,-0.004) | 0.044 |
| 11 | (10.000,-10.000) | (9.998,-10.001) | (-0.002,-0.001) | 0.002 |
| 12 | (20.000,-20.000) | (20.005,-20.037) | (0.005,-0.037) | 0.037 |
| 13 | (30.000,-30.000) | (30.035,-30.065) | (0.035,-0.065) | 0.074 |
| 14 | (30.000,-10.000) | (29.994,-10.009) | (-0.006,-0.009) | 0.011 |
| 15 | (10.000,-30.000) | (10.027,-30.037) | (0.027,-0.037) | 0.046 |
| 16 | (-10.000,-10.000) | (-10.018,-10.001) | (-0.018,-0.001) | 0.018 |
| 17 | (-20.000,-20.000) | (-20.002,-20.004) | (-0.002,-0.004) | 0.004 |
| 18 | (-30.000,-30.000) | (-29.988,-30.017) | (0.012,-0.017) | 0.021 |
| 19 | (-10.000,-30.000) | (-10.007,-30.023) | (-0.007,-0.023) | 0.024 |
| 20 | (-30.000,-10.000) | (-29.994,-9.992) | (0.006,0.008) | 0.010 |
表4 实验结果
Tab. 4 Experimental results
| 选取点 | 实际坐标(mm) | 定位坐标(mm) | (ΔX,ΔY) | 误差 |
|---|---|---|---|---|
| 1 | (-10.000,10.000) | (-10.031,10.005) | (-0.031,0.005) | 0.031 |
| 2 | (-20.000,20.000) | (-20.034,20.006) | (-0.034,0.006) | 0.035 |
| 3 | (-30.000,30.000) | (-30.013,30.006) | (-0.013,0.006) | 0.014 |
| 4 | (-30.000,10.000) | (-30.008,10.027) | (-0.008,0.027) | 0.028 |
| 5 | (-10.000,30.000) | (-10.021,29.985) | (-0.021,-0.015) | 0.026 |
| 6 | (10.000,10.000) | (9.994,10.009) | (-0.006,0.009) | 0.011 |
| 7 | (20.000,20.000) | (20.008,20.003) | (0.008,0.003) | 0.009 |
| 8 | (30.000,30.000) | (30.057,30.001) | (0.057,0.001) | 0.057 |
| 9 | (30.000,10.000) | (29.980,10.015) | (-0.020,0.015) | 0.025 |
| 10 | (10.000,30.000) | (10.044,29.996) | (0.044,-0.004) | 0.044 |
| 11 | (10.000,-10.000) | (9.998,-10.001) | (-0.002,-0.001) | 0.002 |
| 12 | (20.000,-20.000) | (20.005,-20.037) | (0.005,-0.037) | 0.037 |
| 13 | (30.000,-30.000) | (30.035,-30.065) | (0.035,-0.065) | 0.074 |
| 14 | (30.000,-10.000) | (29.994,-10.009) | (-0.006,-0.009) | 0.011 |
| 15 | (10.000,-30.000) | (10.027,-30.037) | (0.027,-0.037) | 0.046 |
| 16 | (-10.000,-10.000) | (-10.018,-10.001) | (-0.018,-0.001) | 0.018 |
| 17 | (-20.000,-20.000) | (-20.002,-20.004) | (-0.002,-0.004) | 0.004 |
| 18 | (-30.000,-30.000) | (-29.988,-30.017) | (0.012,-0.017) | 0.021 |
| 19 | (-10.000,-30.000) | (-10.007,-30.023) | (-0.007,-0.023) | 0.024 |
| 20 | (-30.000,-10.000) | (-29.994,-9.992) | (0.006,0.008) | 0.010 |
| 1 | HUGHES S R, BUTT R, BARTULETT S, et al. Design and construction of a first-generation high-throughput integrated robotic molecular biology platform for bioenergy applications[J]. Journal of Laboratory Automation, 2011, 16(4):292-307. |
| 2 | ALYSSA M R, TANVEER S B, ROSSANA C, et al. Targeted proteomics for metabolic pathway optimization: application to terpene production[J]. Metabolic Engineering, 2015, 13(2):194-203. |
| 3 | 田良玉. 乳酸菌高密度规模发酵工艺优化[D]. 扬州:扬州大学,2018. |
| TIAN Liangyu. Optimization of high-density fermentation process of lactic acid bacteria[D]. Yangzhou :Yangzhou University, 2018. | |
| 4 | 杨书香,刘群. 基因检测技术的应用及国内行业发展现状[J]. 绿色科技,2015,12:281-283. |
| YANG Shuxiang, LIU Qun. Application of gene detection technology and development status of domestic industry[J]. Green Technology,2015,12:281-283. | |
| 5 | 何青梅.生物技术在农业作物病虫害防治上的使用[J].农民致富之友,2018(16):59. |
| HE Qingmei. The application of biotechnology in the control of agricultural crop diseases and insect pests[J]. Friends of Farmers Getting Rich,2018(16):59. | |
| 6 | 冯薇. 现代生物技术的知识产权保护及企业的相关策略研究[D].成都:电子科技大学,2011. |
| FENG Wei. Research on intellectual property protection of modern biotechnology and related strategies of enterprises[D]. Chengdu: University of Electronic Science and Technology, 2011. | |
| 7 | 王会, 戴俊彪, 罗周卿. 基因组的"读-改-写"技术[J]. 合成生物学, 2020, 1(5): 503-515. |
| WANG Hui, DAI Junbiao, LUO Zhouqing. The "read-modify-write" technology of genome[J]. Synthetic Biology Journal, 2020, 1(5): 503-515. | |
| 8 | 袁盛建, 马迎飞. 噬菌体合成生物学研究进展和应用[J]. 合成生物学, 2020, 1(6): 635-655. |
| YUAN Shengjian, MA Yingfei.Research progress and application of phage synthetic biology[J]. Synthetic Biology Journal, 2020, 1(6): 635-655. | |
| 9 | 齐永. LRIG3基因在三种膀胱癌细胞系中的表达及对其细胞周期、侵袭性和凋亡的影响[D].武汉:华中科技大学,2012. |
| QI Yong. LRIG3 gene expression in three bladder cancer cell lines and its effect on cell cycle, invasiveness and apoptosis[D]. Wuhan: Huazhong University of Science and Technology,2012. | |
| 10 | 张钰. rhAm原核/真核表达系统的构建及其生物学活性研究[D].广州:暨南大学,2018. |
| ZHANG Yu. Construction of rhAm prokaryotic / eukaryotic expression system and its biological activity[D]. Guangzhou: Jinan University, 2018. | |
| 11 | 孙成信.国产自动化实验室流水线产品未来发展和技术预测[J].临床检验杂志(电子版),2020,9(1):249-251. |
| SHUN Chengxin. The future development and technology prediction of domestic automated laboratory assembly line products [J]. Journal of Clinical Laboratory Medicine (Electronic Version), 2020, 9(1):249-251. | |
| 12 | Uber D C, Jaklevic J M, Theil E H,et al.Application of robotics and image processing to automated colony picking and arraying[J]. Biotechniques, 1991, 11(5):642-647. |
| 13 | Jones P, Watson A, Davies M,et al.Integration of image analysis and robotics into a fully automated colony picking and plate handling system[J].Nucleic Acids Research, 1992, 20(17):4599-4606. |
| 14 | Briner D R, Sardhara A D, Sugar T G.A multi-pin end-effector for a robotic colony picker[C]//2009 ASME Early Career Technical Conference,Alabama:ASME Early Career Technical Journal, 2009:222-228. |
| 15 | Hughes S R, Butt T R, Bartolett S, et al. Design and construction of a first-generation high-throughput integrated robotic molecular biology platform for bioenergy applications[J]. Journal of Laboratory Automation, 2011, 16(4):292-307. |
| 16 | Heins R A, Cheng X, Nath S, et al. Phylogenomically guided identification of industrially relevant gh1 β-glucosidases through DNA synthesis and nanostructure-initiator mass spectrometry[J]. ACS Chemical Biology, 2014, 9(9):2082-2091. |
| 17 | Robotics Hudson. Rapid pick-brochure [EB/OL].[2021-02-26]. . |
| 18 | 于哲.克隆的图像识别及挑取移液机器人运动控制系统[D].广州:机械科学研究院, 2005. |
| YU Zhe. Clone image recognition and picking pipette robot motion control system [D]. Guangzhou: Institute of Mechanical Science, 2005. | |
| 19 | 张国忠.克隆挑取及微量液体提取机器人控制系统[D].广州:机械科学研究院, 2004. |
| ZHANG Guozhong. Cloning picking and micro liquid extraction robot control system [D]. Guangzhou: Institute of Mechanical Science, 2004. | |
| 20 | 曾祥忠. 机器视觉及其应用(系列讲座)第二讲图像采集技术—机器视觉的基础[J]. 应用光学, 2006(6):5-9. |
| ZENG Xiangzhong. Machine vision and its applications (series lectures) lecture 2: image acquisition technology—the foundation of machine vision [J]. Applied Optics, 2006 (6): 5-9. | |
| 21 | 雷文华. 机器视觉及其应用(系列讲座)第一讲机器视觉发展概述[J]. 应用光学, 2006(5):1-4. |
| LEI Wenhua. Machine vision and its applications (series lectures) lecture 1: overview of machine vision development [J]. Applied Optics, 2006 (5): 1-4 | |
| 22 | 朱虹. 机器视觉及其应用(系列讲座)第三讲图像处理与分析—机器视觉的核心[J]. 应用光学, 2007(1):10-13. |
| ZHU Hong. Machine vision and its applications (lecture series) lecture 3 image processing and analysis—the core of machine vision [J]. Applied Optics, 2007 (1): 10-13. | |
| 23 | ZHAO H. Illinois biological foundry for advanced biomanufacturing (iBioFAB)[C]// In Synthetic Biology: Engineering, Evolution, and Design Conference 2015, 2015:784-785. |
| 24 | 张静静,张雯佳,曾磊,等. 迈瑞 BS480 全自动生化分析仪性能评价[J]. 实用医学杂志, 2015, 31(11):1852-1854. |
| ZHANG Jingjing, ZHANG Wenjia, ZENG Lei, et al. Performance evaluation of Mindray BS480 automatic biochemical analyzer[J]. Journal of Practical Medicine, 2015, 31(11):1852-1854. | |
| 25 | 贠远,徐青松,李杨民. 并联微操作机器人技术及应用进展[J]. 机械工程学报, 2008, 44(12):12-23. |
| YUN Yuan, Qingsong XV, LI Yangming. Technology and application progress of parallel micro-operation robot [J]. Journal of Mechanical Engineering, 2008, 44(12):12-23. | |
| 26 | TILLICH U M, WOLTER N, SCHULZE K, et al. High-throughput cultivation and screening platform for unicellular phototrophs[J]. BMC Microbiology, 2014, 14(1):239. |
| 27 | JAVIDPOUR P, DEUTSCH S, MUTALIK V K, et al. Investigation of proposed ladderane biosynthetic genes from anammox bacteria by heterologous expression in E. coli [J]. PLoS One, 2016, 11(3):0151087. |
| 28 | HEINS R A, CHENG X, NATH S, et al. Phylogenomically guided identification of industrially relevant gh1 β-glucosidases through DNA synthesis and nanostructure-initiator mass spectrometry[J]. ACS Chemical Biology, 2014, 9(9):2082-2091. |
| 29 | HUDSON Robotics. Rapid pick-brochure [EB/OL].[2021-02-26]. . |
| 30 | BING W C, XING C, HING P S. Research of BP neural network algorithm testing platform based on OPC communication[J]. Applied Mechanics and Materials, 2014, 21(5): 15-44. |
| 31 | 谢非, 汪璠, 杨继全, 等. 一种目标菌落自动定位与识别方法: 201910211847.7[P]. 2019-06-28. |
| XIE Fei, WANG Pan, YANG Jiquan. A method for automatic positioning and identification of target colonies: CN 201910211847.7 [P]. 2019-06-28. |
| [1] | 刁志钿, 王喜先, 孙晴, 徐健, 马波. 单细胞拉曼光谱测试分选装备研制及应用进展[J]. 合成生物学, 2023, 4(5): 1020-1035. |
| [2] | 刘韧玫, 李乐诗, 杨小燕, 陈显军, 杨弋. RNA转录后代谢时空精密控制技术[J]. 合成生物学, 2023, 4(1): 141-164. |
| [3] | 王喜先, 孙晴, 刁志钿, 徐健, 马波. 拉曼光谱技术在单细胞表型检测与分选中的应用进展[J]. 合成生物学, 2023, 4(1): 204-224. |
| [4] | 林芝, 胡致伟, 瞿旭东, 林双君. 苄基异喹啉类生物碱的微生物合成研究进展及挑战[J]. 合成生物学, 2021, 2(5): 716-733. |
| [5] | 操帆, 陈耀晞, 缪阳洋, 张璐, 刘海燕. 蛋白质计算设计:方法和应用展望[J]. 合成生物学, 2021, 2(1): 15-32. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
